
정보가 없습니다.
[Twice Engineering]3D Printed Soft Exoskeleton
- 민윤경
- 인하대학교
- 작품구분일반형
- 공개여부공개
- 카테고리정보, 전자, 전기, 기계, 의료, 전자, 생활, 기타
- 등록일2017-09-04
- 팀원(공동개발자)
- 출품 경진대회2017 제9회 인하 종합설계 경진대회
- 0
- 0
- 1,585
상세설명
1. 수행배경
소프트 엑추에이터는 소재가 매우 유연하기 때문에 외골격 형태로 착용하더라도 신체에 무리가 가지 않는다. 오이 모양의 소프트 로봇은 두 개의 방향으로 움직일 수 있으며 전체 길이의 5~6배까지 신축적으로 늘릴 수 있다. 또한 사람의 근육을 모사한 엑추에이터를 통해 동작 가능하다. 로봇의 본체를 막대 형태의 부드러운 풍선 모양으로 만들고, 공기 압력을 통해 동작을 제어할 수 있다. 이 소프트 로봇 기술은 환자 재활훈련 로봇, 생체모방 시스템, 가정용 케어시스템 등에 적용 가능하다.
2. 수행기간
7, 8월 - 소프트 액추에이터 설계 및 해석
3. 개발작품 설명
-
본 프로젝트는 상기 기술된 3D Printer를 이용하여 소프트 엑추에이터를 개발하는 프로젝트이다. 아래와 같은 개념을 이용하여 제작되며, 이를 개발하기 위한 이종재료 조형이 가능한 3D프린터 제작을 진행 중이다.
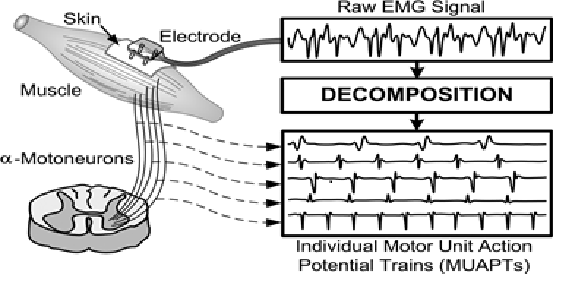
- 엘라스토머를 활용한 소프트 로봇, 변형 억제층을 이용한 자유도 부가 기술, 다양한 사용자들의 근전도 신호를 데이터화 하고 이를 활용할 수 있는 기술을 활용한다.
소개 영상
소개 슬라이드
정보가 없습니다.